

Grande passo avanti per le terapie di precisione del futuro. I ricercatori dell’Università di Stanford hanno messo a punto un millirobot anfibio wireless in grado di rilasciare farmaci all’interno del corpo solo dove serve, grazie all’azione di magneti e strutture pieghevoli che gli consentono di muoversi liberamente.
Lo studio è stato pubblicato sulla rivista scientifica Nature Communications.
COME FUNZIONA IL MILLIROBOT
Il dispositivo, come mostra la foto pubblicata nell’articolo sul sito dell’Università di Stanford, è talmente piccolo da stare sulla punta di un dito.
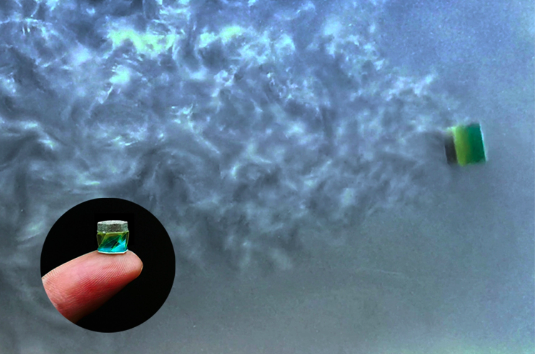
Il millirobot, riferiscono gli studiosi, usa magneti e strutture pieghevoli come origami per muoversi liberamente all’interno del corpo umano, rilasciando i farmaci che trasporta solamente una volta raggiunto l’obiettivo, rendendo così le terapie molto più efficaci e riducendo al minimo l’invasività delle procedure.
L’ingegnere meccanico Renee Zhao, mente del millirobot e uno degli autori della ricerca, ha spiegato che a differenza delle pillole inghiottite o dei liquidi iniettati, questo dispositivo trattiene il farmaco finché “non raggiunge il bersaglio e poi lo rilascia ad alta concentrazione. È così che il nostro robot ottiene una somministrazione mirata di farmaci”.
ALTRE FUNZIONALITÀ
Ma il millirobot anfibio se oltre ai farmaci liquidi trasportasse minuscoli strumenti e telecamere potrebbe essere rivoluzionario anche per le diagnosi.
Lo sostengono gli autori dello studio, i quali aggiungono che il team sta anche lavorando all’utilizzo di immagini a ultrasuoni per tracciare il percorso dei robot, eliminando la necessità di aprire gli organi.
A COSA SERVONO I CAMPI MAGNETICI
I campi magnetici, che alimentano il dispositivo, gli consentono un movimento continuo e l’autonomia di cambiare conformazione con l’obiettivo di raggiungere le superficie di un organo o muoversi nel sangue.
IL ROBOT-ORIGAMI
I ricercatori, coordinati da Qiji Ze e Shuai Wu, hanno analizzato dimensione e forma di ciascun elemento pieghevole che compone il particolare “robot-origami”. In questo modo, il millirobot anfibio può controllare i propri movimenti a seconda delle necessità.
Come hanno osservato gli autori dello studio, un altro aspetto innovativo è proprio la combinazione di alcune specifiche caratteristiche geometriche. Per esempio, un foro longitudinale e diverse fessure laterali inclinate verso l’alto che hanno la capacità di ridurre la resistenza all’acqua e permettono una migliore “navigazione”.
Zhao ha spiegato che il design del dispositivo “crea una pressione negativa all’interno del robot per il nuoto veloce e nel frattempo permette anche l’aspirazione per il ritiro e il trasporto del carico”.
“Nello studio – conclude Zhao -, abbiamo sfruttato appieno le caratteristiche geometriche di questo piccolo robot e abbiamo esplorato ogni conformazione in modo che rispondesse a diverse funzioni”.






